自律走行
レーザーレンジ(測域)センサを用いてロケーションマップ(基準地図)を作成。
作成された地図と同じセンサでセンシングされた自己位置情報を照らし合わせ車輌の位置を常時認識・監視。
0.25°を25msという精細且つ高速なスキャニングによって正確な位置情報を取得。




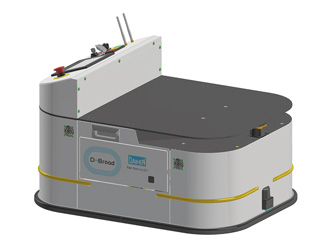
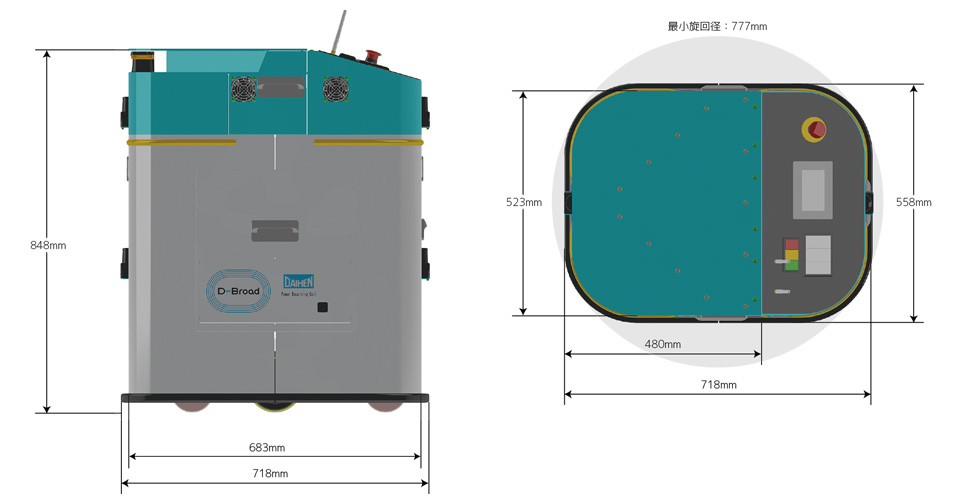
スリムで狭い空間でも小回りの効く縦型タイプをラインナップしております。
PLCによる走行・操舵・停止制御を採用し抜群の自己位置保持精度・停止精度を誇っています。 ※±10mm、社内実験実力値
カスタマイズで10㎏可搬程度の人協働ロボットの(ロボット質量による)などに最適、ロボットの安全面を考慮したセーフティーセンサなども自由にカスタマイズでき、加えてロボットハンドやビジョンセンサなども同時に導入検討する事で立ち上げまでのリードタイムを大幅に短縮する事が可能となります。
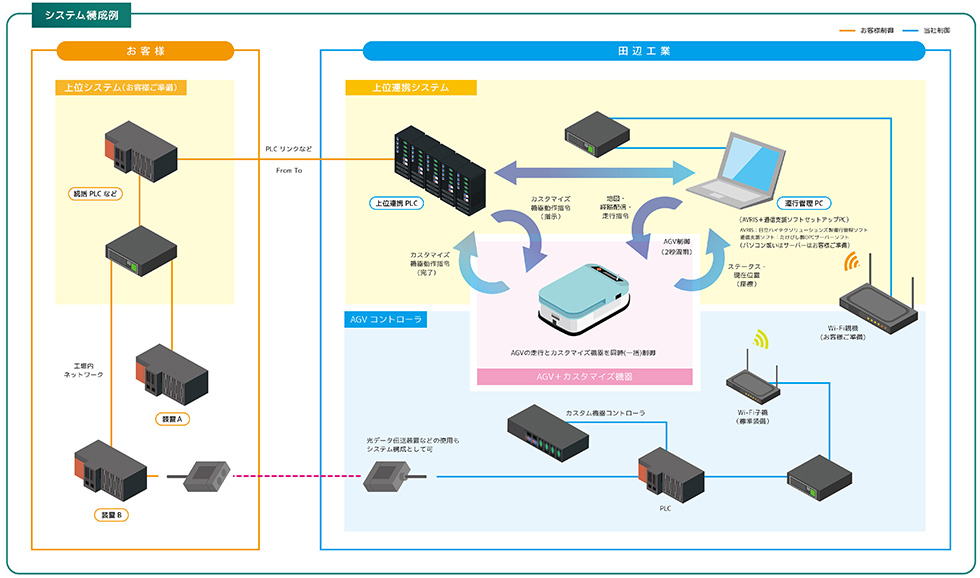
カスタマイズされた機器やロボットは1台のPLCで走行制御と機器(ロボット)制御を実現しています。
走行と動作を繰り返し行う製造現場においては、スピードや正確性は勿論の事、万全な安全対策にもPLC制御によって制御する事で抜群の機器間の親和性を併せ持ち、安心してお使い頂けます。
【納入実績・お客さまの声はこちらから!】
【その1】 【その2】 【その3】
【すべての製品・サービスはこちら!】
| 適用範囲 | 無人搬送車本体 | ||
| 搬送対象 | - | ||
| - | |||
| 走行 | 走行機能 | 前進・後退・カーブ・スピンターン | カーブ最小推奨半径は700mm |
| 走行速度 | 30m/min | 速度は5段階で切替可(10,20,30,40,50m/min) | |
| 停止精度 | ±15mm ※10m/minの減速走行での繰り返し停止精度 | 周囲環境に依存 | |
| 最小通過幅 | 600mm | ||
| 走行時間 | 連続走行時間 8H / 充電時間 2H | 稼働・運用状況により変化 | |
| 走行制御方式 | 駆動方式 | 2輪独立制御 サーボモータ | |
| モータ定格 | 165W 2軸 | ||
| 制動装置 | 運転中は電気式制動、停止時は電磁ブレーキによる保持 | ||
| 制御方式 | ACサーボモータ駆動 | ||
| ステアリング方式 | 二輪速度差方式 | ||
| 車体重量 | 280kg | ||
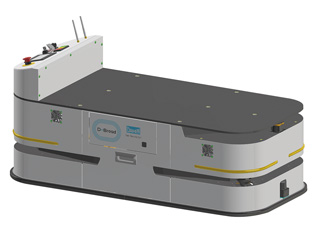
| 車体寸法 | W:558mm L:718mm H:848mm (荷台高さ:848mm) | ※寸法はバンパーセンサ含む | |
| 移載方式 | 天板上に人手により荷物を積載する或いは専用装置を設置 | 専用装置を設置する場合は協議(オプション) | |
| 誘導方式 | ガイドレス誘導方式 | ||
| 充電方式 | 交換式或いは非接触充電式 | 非接触充電(オプション) | |
| 運転方式 | 運行管理システムにより経路を選択しWi-Fi通信を用いて指示 ※複数台制御、上位システム連携は別途ご相談ください。 |
走行エリアのロケーションマップ(マスター地図)を作成する際は手動操作或いは専用リモコンを使用する。 ※リモコンはオプション" |
|
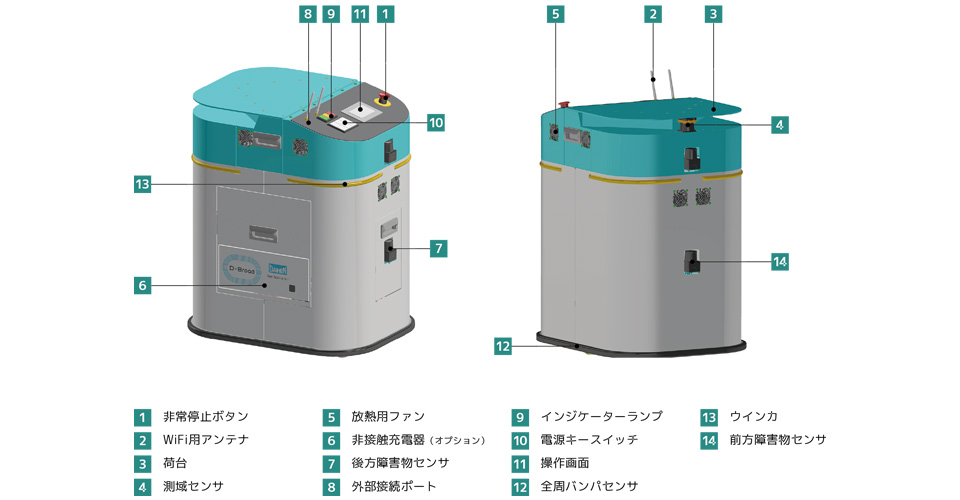
| 安全装置 | ・非常停止ボタン(1箇所) 操作部に配置してある非常停止ボタンを押すことで停止 ・障害物センサ(前・後) 進行方向の障害物を検知し減速、さらに接近すると停止 ・バンパーセンサ 下部のバンパーセンサに接触することで停止 ・警報装置 走行中は警報装置より警告音を発して走行 LED表示灯(操作部に1箇所) 走行中 ・エラー発生中 ・停止等の状態表示 |
||
| 通信方式 | 無線 | Wi-Fi 2.4GHz或は5GHz 規格:IEEE802.11 | |
| バッテリ | 種類 | リチウムイオン電池 | |
| 容量 | 容量:45Ah 公称電圧27.6V | ||
| 数量 | 1ケ | 2ケ搭載仕様も可能(オプション) | |
| 車体仕様 | 駆動輪 | φ130タイヤ ポリウレタン | |
| 補助輪 | φ100タイヤ ポリウレタン | ||
| 準拠規格 | JIS:D6801, 6802, 6803, 6804, 6805 準拠予定 |
| 床面 | うねり:10mm/m |
| 路面勾配:1度 | |
| 段差:5mm | |
| 溝幅:10mm | |
| 床面仕上げ:塗装 | |
| 環 境 | 使用場所:屋内の一般環境 |
| 周囲温度:0°C~40°C | |
| 湿度:20%~80% 結露無き事 | |
| 雰囲気:水分、塵埃、腐食性のガスが無いこと |
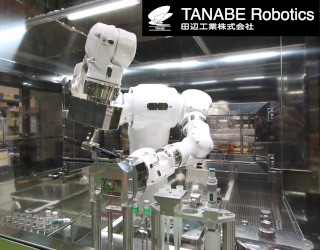
田辺工業では様々なメーカー・タイプ・機種のロボット搭載AGVにチャレンジしています。
ロボットを搭載する上で、様々な規制や安全に関する課題にも積極的に取り組んで参りました。
過去では考えられなかった”AGVにロボットを搭載し仕事をさせる”それが今現実に製造現場への導入が加速しています。
AGVの開発・製造に留まらず、自動化・ロボット設備に30年以上携わってきた田辺工業だからこそ出来る技術、実現可能な提案。
皆様が悩まれている導入への課題・高いハードルを田辺工業と超えてみませんか。

ユニバーサルロボット UR10e搭載型
ロボット概略仕様
構造:垂直多関節型 6軸 / 可搬質量:10㎏ / 本体質量:33.5㎏
適用コントローラ:専用コントローラボックス

レーザーレンジ(測域)センサを用いてロケーションマップ(基準地図)を作成。
作成された地図と同じセンサでセンシングされた自己位置情報を照らし合わせ車輌の位置を常時認識・監視。
0.25°を25msという精細且つ高速なスキャニングによって正確な位置情報を取得。
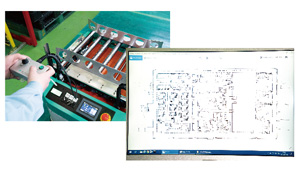
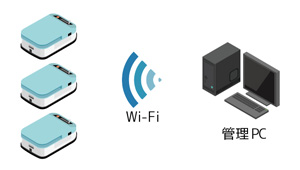
専用の運行管理システム(ソフトウェア)を用いてパソコン上で楽々経路設定。
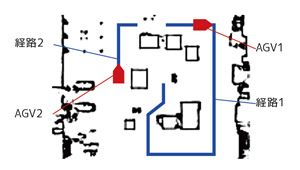
複数経路を事前に設定し、複数のAGVを自由自在に運行管理、監視制御する。
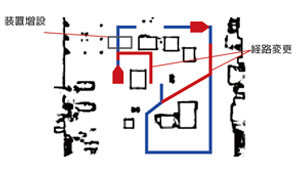
スキャニングによって取得された基準地図は全体的な書き換えや部分書き換えも可能。 ※部分書き換え機能はオプション
実際のロケーション変更(工場内の大幅レイアウト変更)にも柔軟に対応。
ガイドレスならではの、軌道(磁気テープ)の張り替え作業などは一切不要。
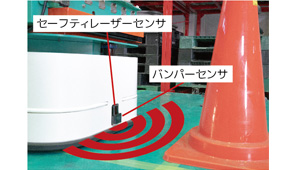
車輌前後のセーフティーレーザセンサで障害物を検出すると減速或いは自動的に一時停止。
全周にバンパーセンサを採用する事で万が一の衝突などにも考慮した万全の安全対策。
またロボット搭載など更に安全が求められる場合でも柔軟に対応。※オプション

バッテリーの残量を監視しAGV充電ステーションへ自動で走行させる設定なども上位システムとの連携で可能。
24時間稼働にも対応。バッテリー交換の手間や重労働から解放。

カスタマイズ対応事例で紹介した様々なカスタマイズに柔軟な対応。
機構設計から製造、制御、安全の観点にも徹底的に拘り理想の1台を提供。

路面の状態や工場内の雰囲気を確認し AGV が走行可能か判断する。

Wi-Fiの電波強度や干渉状態を確認・調査しAGVが走行可能か判断する。
Wi-Fi環境が無い場合は適切な機器選定や無線機器の必要台数などを提案。
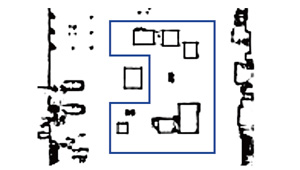
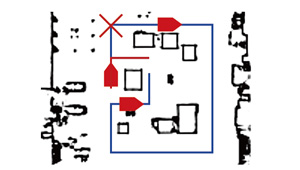
リモコン操作によってAGVが実際に走行する対象エリアを走らせ基準地図を取得。
基準地図は複数取得する事が可能で、基準地図を切り替えながら走行する事で大規模工場にも対応。
※:1枚の地図サイズは最大で、500mx500m
取得した基準地図上に幾重にも経路を作成する。出発地点と到着地点を複数登録する事で様々な走行経路を選択できる。
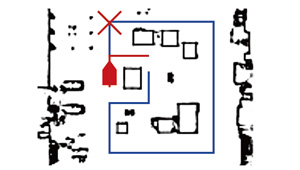
AGVと周辺環境との干渉等を事前に運行管理システム上で確認する事が出来る。
シミュレーション上で予め効率よく安全な経路を定める事により、立上げ時のリードタイムを短縮する。
作成された基準地図と経路をAGVに配信。AGVはその指示に従い安全且つ効率的に走行する。
走行中のAGVは随時自身の走行状態を運行管理システムへ報告。走行状態から得られた情報によりAGVの状態監視を行う。AGVの様々な機器情報を随時収集・監視する事でトラブルも即座に発見し、生産の停止時間を最小限に抑え稼働効率を維持する。
当社が提供する運行管理システムでは、複数台のAGV走行を随時監視。工場内でAGVの走行が重なる交差点などでは優先車輌を制御、また電圧低下によるバッテリーの残容量監視を行うなど、効率よく安全にAGVの走行を見守ります。
なお、お客さまの生産管理システムや生産設備PLCとの連携についても、ご提案が可能です。
製品に関するお問い合わせ
製品に関するお問い合わせは担当者が直接ご対応いたします。
メールまたはお電話にてお問い合わせください。